
Körmy rakennustyömaalle?
Mobiilirobotiikka löytää tiensä tasaisella tahdilla yhä uusille alueille. Körmy on kustannustehokkaasti toteutettu kauko-ohjattava rakennusteline. Sellainen voi löytyä lähitulevaisuuden usealta työmaalta.
Rakennustyömailla mobiilirobotiikan hyödyntäminen on vielä alkutekijöissään. Osasyynä tähän lienee alan taipumus omaksua uusia teknologioita monia muita aloja verkkaisemmin. Myös rakennuskohteiden vaihtelevuus asettaa omat haasteensa – tulisihan saman robotin kyetä olemaan hyödyksi laajan ja avaran teollisuushallin, modernin kerrostalon ja vaikka ydinvoimalan rakennustyömaan olosuhteissa. Toki nykyisellä teknologialla on mahdollista luoda sellainen mobiilirobottialusta, joka kykenee toimimaan sujuvasti hyvinkin vaihtelevissa olosuhteissa. Ongelmaksi tulevat järjestelmän kustannus sekä käyttöönoton ja robotin sujuvan toiminnan vaatimat järjestelyt..
Helposti kuviteltavissa olevia hyötyjä mobiilirobotista ainekin laajemmilla rakennustyömailla löytyy automaattisesta tavarankuljetuksesta ja yksinkertaisten toistuvien tehtävien suorittamisesta vaikka autonomiseen lattiaepoksin levittämiseen tai pintojen maalaamiseen. Raskaiden tavaroiden kuljettamiseen ja nostamiseen markkinoilta löytyykin joitain rakennuskohteisiin räätälöityjä kauko-ohjattavia alustoja, mutta valikoimaa ei voi kovin kattavaksi kutsua.

Rakennusrobotit työntouhussa. Lähde: https://roboticsbiz.com/different-types-of-robots-transforming-the-construction-industry/
Mobiilirobottien ja robotiikan laajempaa hyödyntämistä tutkitaan ja visioidaan aktiivisesti niin yritysten, yhteistyöelinten kuin valtiollisten tahojenkin toimesta. Esimerkkeinä mainittakoon vaikka Saksassa Koulutus- ja tutkimusministeriön rahoittama hanke, jossa pyritään määrittelemään rakennustyömaan laitteiden väliselle tiedonsiirrolle pelisäännöt. Projekti kulkee nimellä IoC – Internet of Construction, eli rakennustyömaan internet. Kiinalainen Winsun on kehittänyt betonin 3D-tulostamista vuosituhannen vaihteen tienoilta asti ja esitteli ensimmäiset 3D-tulostetut rakennukset 2015. Sittemmin yritys on toteuttanut kokonaisia kerrostalokortteleita tulostamalla. (1; 2.)
Tarve ja visio
Rakennustyömaalle räätälöidyn mobiilirobotin toteutukseen ei välttämättä tarvita raskasta valtiojohtoista organisaatiota, tai suuryritystä. Riittää kun löytyy visionääri, joka haluaa lähteä rohkeasti ideoimaan jotain uutta ja sellaista, mitä saatetaan vielä vierastaa alalla. Tällä kertaa sellainen visionääri löytyi rakennuskohteiden pintojen käsittelyyn erikoistuneesta pk-yrityksestä. Lisätään vielä kaavaan teknisten ratkaisujen tekemisen kannalta olennainen elementti, eli tuleva tai nykyinen insinööri ja Metropolian tarjoamat loistavat tilat ja työvälineet. Enää tarvitaan projektille nimi ja mikä kuvaisikaan paremmin liikkuvaa rakennustelinettä kuin Körmy.
Projekti Körmy lähti liikkeelle aidosta tarpeesta. Asiakasyritys on keskittynyt pääasiallisesti vaihteleviin rakennuskohteiden pintojen käsittelyyn liittyviin urakoihin, joka sisältää maalausta, rappausta, tapetointia ja muita vastaavia tehtäviä. Perinteistä liikuteltavaa rakennustelinettä käytetään työskentelyalustana työkohteissa.
Asiakkaan visiona on laajentaa liikuteltavan rakennustelineen ideaa kokonaan uusiksi. Pitkän tähtäimen toiveena on saada toteutettua kauko-ohjattava rakennusteline, joka tarvittaessa kykenee autonomiseen liikkumiseen kohteissa. Rakennustelineeseen on tarkoitus lisätä modulaarisuutta erilaisilla työtasoilla.
Tämän projektin puitteissa oli tarkoitus toteuttaa Körmyn liikuttaminen kauko-ohjauksella konseptitasoisena kokonaisuutena. Projektissa pyrittiin selvittämään, että missä määrin pystytään hyödyntämään yleisesti kuluttajakäyttöön tarkoitettuja komponentteja ja kuinka kustannustehokkaasti kokonaisuus saadaan toteutettua sekä arvioimaan, millä tavoin projektia voisi viedä eteenpäin älyominaisuuksien ja rakenteen osalta mahdollista kaupallista toteutusta varten.
Propellihattu päähän ja toteuttamaan
Körmyn alustana toimii noin 1200 mm x 700 mm liikuteltava 2-tasoinen alumiininen rakennusteline. Telineen pohjalevy toimii komponenttien asennusalustana. Projektin aiemmassa vaiheessa on valittu vetäviksi pyöriksi Xiaomi Essential Lite -sähköpotkulaudoista irrotetut napamoottorilla varustetut pyörät, jotka on kiinnitetty pohjalevyn erikseen työstetyillä laakeripesillä. Renkaiden kääntämisestä huolehtii tavallinen DC-moottori, ja ohjaus välitetään vetäville pyörille ketjulla. Keskusyksiköksi valikoitui Raspberry Pi 4 -minitietokone ja langattomaksi ohjaimeksi PlayStation 4:n yhteydessä julkaistu DUALSHOCK 4 -ohjain.
Kuva3: Körmyn ohjauskoodin luontia ja PlayStation-ohjaimen testailua.
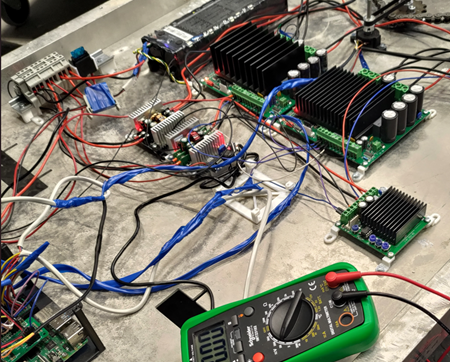
Näiden lähtökohtien perusteella projekti purettiin useampaan osavaiheeseen, jotka pyrittiin ratkaisemaan yksi osavaihe kerrallaan. Projektissa tuli selvittää Xiaomin napamoottoreiden ohjaus hyödyntämällä erillistä moottorinohjainta, sähköskootterin akkujen hyödyntäminen projektin teholähteenä, kääntömoottorin toiminta siten, että ohjauskulma vastaa langattoman ohjaimen joystickin asentoa ja vielä lisäksi ohjauskoodin kirjoittaminen Pythonilla.
Xiaomin napamoottorit ovat tyypiltään BLDC-moottoreita, eli harjattomia tasavirtamoottoreita. Niiden ohjaaminen vaatii perinteistä DC-moottoria monimutkaisemman logiikan, mutta yleisyytensä vuoksi tähän soveltuvia moottorinohjaimia on kattavasti saatavilla. Testailun jälkeen löytyi oikeat moottorinohjaimen asetukset ja merkitykset napamoottorin johtojen väreille. Xiaomin akku on tyypiltään älyakku, eli akkukennojen lisäksi siinä on virransyötöstä ja latauksesta huolehtiva piiri, joka sisältää turvaominaisuuksia esimerkiksi syötettävän virran määrän suhteen. Myös akku todettiin soveltuvaksi projektin tarpeisiin muutamista rajoitteista huolimatta.
Kääntämisestä huolehtiva DC-moottori ei tiedä omaa asentoaan. Ohjauksen toteuttaminen siten, että renkaiden kääntökulma on verrannollinen joystickin asentoon, vaatii kääntökulman reaaliaikaisen tiedon. Ratkaisuksi tähän päätettiin hyödyntää tavallista potentiometriä eli säätövastusta, joka on yhdistetty kääntömoottorin akseliin. Näin potentiometrin resistanssi muuttuu kääntömoottorin akselin perusteella. Syötettäessä jännite potentiometrille saadaan ulos muuttuva jännite ja tämä muuttuva jännite muunnetaan digitaaliseksi signaaliksi Raspberry Pi:llä. Kääntömoottorin ohjaussignaalissa piti ottaa huomioon komponenteista ja mekaanisista osista aiheutuvat hitaudet, jotta ohjaus toimii sulavasti.
Loppuvaiheessa projektia Körmyyn päätettiin vielä lisätä esteiden tunnistamista varten ultraäänianturit. Antureita on 2 kappaletta ja ne on sijoitettu osoittamaan menosuuntaan. Ultraääniantureilla lähetetään pulssi ja kuunnellaan pulssin kaikua. Lähetyksen ja vastaanoton välisen ajan perusteella pystytään laskemaan etäisyys Körmyn edessä olevaan kohteeseen. Etäisyyden perusteella määritellään Körmyn maksiminopeus. Esteen ollessa riittävän lähellä ei liikkuminen eteenpäin enää ole mahdollista.
Körmyn koko ohjauksen vaatimaa ohjelmakoodia kertyi yhteensä noin 300 riviä. Projektin yksilöllisen luonteen vuoksi valmista ohjelmakoodia ei ollut saatavilla. Ohjelmakoodi kirjoitettiin siis alusta alkaen itse lukuun ottamatta PlayStation-ohjaimen ja DAC-muuntimen ohjelmakirjastoja. Komponenttien kiinnitykseen käytettiin itsesuunniteltuja 3D-tulostimella tulostettuja osia.
Kuva3: Körmyn ohjauskoodin luontia ja PlayStation-ohjaimen testailua.
Lopuksi
Projektin lopputuloksena saatiin Körmy tottelemaan PlayStation-ohjainta ja halutut ominaisuudet, kuten renkaiden kääntäminen ja lähestymisanturi toimimaan toivotulla tavalla. Projektissa käytettiin yleisesti saatavilla olevia kuluttajakäyttöön tarkoitettuja osia ja näin kustannukset saatiin pidettyä tavoitteiden mukaisesti maltillisena. Kokonaisuus on toteutettu konseptitasolla, joten Körmy ei ihan vielä ole valmis rakennustyömaalle. Projektin pohjalta on mahdollista lähteä pohtimaan jatkokehitystä ja mahdollisia lisäominaisuuksia.
Projekti myös osoittaa sen, että aina ei tarvita suurta ja kallista koneistoa ideoiden toteuttamiseen. Usein tarvitaan vain se, joka uskaltaa rohkeasti tuoda ideansa ja visionsa esille, vaikka ympäriltä kuuluukin soraääniä. Metropolia pitää huolen, että näiden ideoiden ja visioiden toteuttajia riittää tulevaisuudessakin.
Lähteet
1. IoC. 2023. Verkkoaineisto. IoC. <https://www.internet-of-construction.com/index_en.html>. Luettu 20.5.2023.
2. TechCentral.ie. 2015. Chinese company reveals 3D-printed buildings. Verkkoaineisto. <https://www.techcentral.ie/chinese-company-reveals-3d-printed-buildings/>. Luettu 20.5.2023.

Kirjoittaja
Mika Ollikainen
Kesäkuussa 2023 valmistuva sähkö- ja automaatiotekniikan insinööri
Metropolia Ammattikorkeakoulu