
Kumman yhteistyörobotin valitsen: Universal Roboticsin vai ABB:n?
Blogikirjoitus Machine Tool projektista
Tässä blogitekstissä vertailen ABB:n Wizard Easy Programming-ohjelmistolla varustettujen yhteistyörobottien ja Universal Robotcsin e-sarjan yhteistyörobottien ohjelmointia ja helppokäyttöisyyttä. Suomessa ja maailmalla on kyllä muitakin kobottien valmistajia, mutta opintojen aikana olen tehnyt projekteja juuri näiden valmistajien eri mallien kanssa.
Yhteistyörobotti takaamaan laatua hitsauksessa
Itse kokonaisuuden kokoaminen ei lopulta ollut hankalaa, vaikka aikaa siihen kului viikko. Suurimman ajan vei dokumentointi. Kun laitteisto oli koossa, alkoi hauska vaihe eli robotilla hitsaaminen ja sen opettelu. Hitsaus laitteistolla oli yllättävän helppoa: robotille käytiin näyttämässä haluttu hitsausrata, asetettiin parametrit hitsausta varten ja ihailtiin, kun robotti suorittaa liikkeet tarkasti ja vakaasti.
Lopputuloksena tälle projektille oli laaja kokoamis- ja käyttöönotto-ohje, joka tulee laitteiston mukana, kun jokin yritys tällaisen hankkii. Tarkoituksena oli, ettei yrityksen tarvitse tietää laitteiston toiminnasta pystyäkseen kokoamaan ja ottamaan sen käyttöön.

Hitsauslaitteiston parametreja muutettiin tietokoneen avulla.
Yhteistyörobotti on ihmisen tuleva työkaveri
Yhteistyörobotti on robotti, joka toimii yhteistyössä ihmisen kanssa. Yhteistyörobottia kutsutaan usein kobotiksi. Sana kobotti kääntyy suoraan englanninkielisestä sanasta cobot, joka taas on lyhenne sanasta collaborative robot
Kobotin kanssa työskentely on turvallista, eikä sen ympärille tarvita turva-aitoja tai muita turvalaitteita. Kobotin nivelissä on voima-anturit, jotka tunnistavat törmäyksen ja pysäyttävät kobotin törmäyksen tapahtuessa. Kobotin liikkeet ovat eivät ole yhtä nopeita ja voimakkaita kuin teollisuusrobotin, jolloin törmäyksen tapahtuessa se pysähtyy nopeasti ja vaivattomasti.
Kobotit ovat helppokäyttöisiä ja siirrettävissä helposti paikasta toiseen. Niiden ohjelmointi on tehty helpoksi ja nopeaksi. Ohjelmointi tapahtuu opettamalla: siirrä kobotti haluttuun paikkaan, kerro, mennäänkö sinne lineaarisella liikkeellä vai kobotin laskemaa reittiä, ja tallenna toiminto.
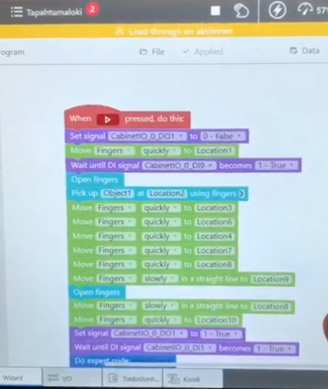
ABB:n yhteistyöroboteissa on käytössä Wizard Easy Programming -ohjelmisto. Se on ohjelmointitapa, jossa käyttäjän ei tarvitse käyttää ohjelmointikieltä tai koodaamista. Ohjelmointi perustuu visuaaliseen Blockly-koodausmenetelmään. Menetelmä kuvaa ohjelmointikielen ja -koodin visuaalisina lohkoina1.
Itse kutsun tätä palapeliohjelmoinniksi. Ohjelmointi on kuin helppo lasten palapeli, jossa kaikki palat sopivat toisiinsa. Valikosta löytyy valmiita paloja, joista kootaan mieluinen ohjelma. Palat sisältävät toimintoja, kuten ”siirrä”, ”poimi” ja ”laske”. Näistä toiminnoista rakennetaan ohjelma ja käydään kädestä pitäen robotille näyttämässä paikka, jossa kyseinen toiminto suoritetaan. Wizard-palikkaohjelmointi toimii hyvin peruskäytössä, mutta vaikeamman ohjelman tekemisessä joutuu kumminkin turvautumaan Rapid-ohjelmointikieleen, sillä paloja ei ole luotu vielä ihan kaikille toiminnoille.
Universal Roboticsin e-sarjan ohjelmointi
Kuva 3. Rakennustyömaan paikkatietojärjestelmän testauksen suunnittelua ennen varsinaisen testauksen aloittamista Hyvinkään sairaalalla.
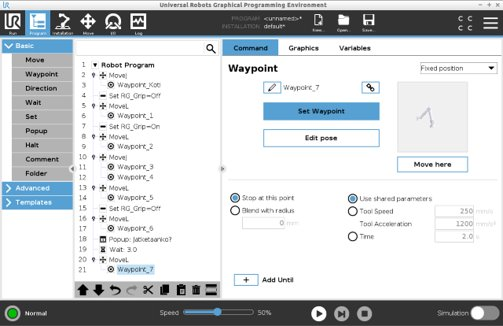
UR:n ohjelmointia.
Helppokäyttöisyys ja käyttöönotto
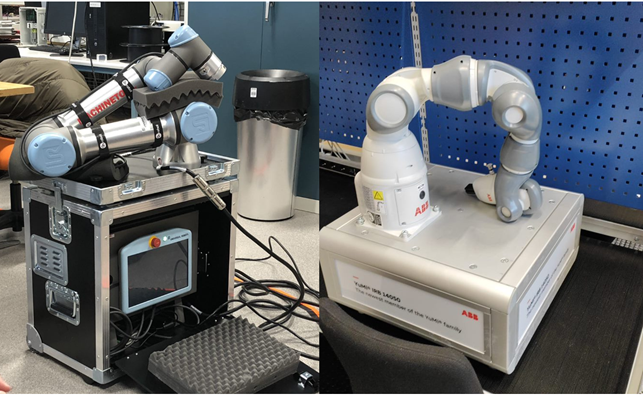
Kobottien käyttöönotto ei eroa mitenkään toisistaan. Ohjausyksikön töpseli seinään ja kobotti päälle. Tämän jälkeen molemmat ovat toiminta kunnossa ja valmiita ohjelmoinnille. Molemmat ovat ulkomuodoltaan pyöreitä ja silmää miellyttäviä sekä molempiin pystyy vaihtamaan nopeasti työkalupään riippuen työtehtävästä.
Miten valmistajien mallit eroavat toisistaan?
Vastaus kysymykseen, miten nämä eroavat toisistaan, kuuluu: hyvin vähän, toisen kyljessä lukee ABB ja toisen UR. Ohjelmointi molemmissa on tehty helpoksi ja ymmärrettäväksi. Toiminnot ovat kutakuinkin samat. Molempien valmistajien malleja voidaan soveltaa useisiin teollisuuden tarpeisiin.
Suurin ero taitaa löytyä taakan kannattelevuudessa. UR20-malli pystyy kannattelemaan 20 kg:n taakkaa, kun ABB:n kobotin suurin kantavuus on 11 kg. Kumman sitten valitsisin tekemään yhteistyötä kanssani? Siihen en osaa antaa vastausta, sillä valinta riippuu paljon työtehtävästä, joka kobotille annetaan.
Lähteet
1 ABB:n robottia voi ohjelmoida ilman koodia. 2020. Verkkoaineisto.
Etn. <https://etn.fi/index.php/13-news/10662-abb-n-robottia-voi-ohjelmoida-ilman-koodia>.
Luettu 19.12.2022.
Kirjoittaja
Viljami Rinne
Projektiassistentti