Auriga halusi parantaa jäteautojensa kuskien työturvallisuutta kehittämällä valon, joka pystyy automaattisesti seuraamaan kuskia ja valaisemaan ympäristön silloin, kun kuski liikkuu rekan ulkopuolella. Kuskit hakevat jätteet pääosin rekalla sen välittömästä läheisyydestä, mutta joskus heidän täytyy kulkea hieman pidempi matka rekalta jätteiden luokse. Tällöin etenkin pimeään vuodenaikaan voi sattua onnettomuuksia, joita spottivalolla voidaan ehkäistä.
Projekti jaettiin seuraavaan neljään vaiheeseen:
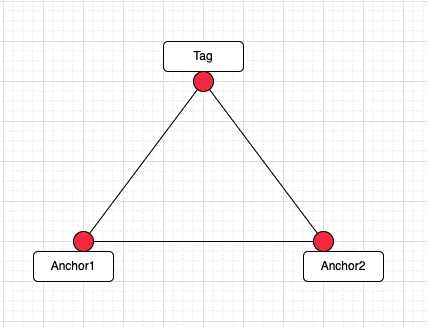
1. Hankittiin etäisyysmitta kolmen ESP32 UWB -mikrokontrollerin välillä
Kun etäisyys tagin ja kahden ankkurin välillä löydetään, voidaan paikallistaa kuski, joka kantaa tagin mikrokontrolleria mukanaan koko ajan, mikäli haluaa valon seuraavan häntä. Kaksi ankkuria asennetaan rekkaan ja niiden välinen etäisyys on kiinteä.
Testauksessa todettiin, että etäisyyden mittaaminen onnistui lähes 40-50 cm virhemarginaalilla ja 18-20 metrin kantavuudella.
2. Perustettiin viestintäyhteys ankkureiden sekä slaven (ESP32) välillä
Kun etäisyysmitta tagin ja kahden ankkurin välillä oli saatu, tarvittiin nämä mitat yhteen sijaintiin. Sitä varten perustettiin I2C-yhteys näiden kahden ankkurin (“masters”) ja yhden ylimääräisen ESP32-kontrollerin (“slave”) välille. Sama slave kontrolloisi valoa myöhemmin.
I2C-yhteys perustettiin onnistuneesti ja nyt kaikki tarvittavat mitat oli saatavilla, jotta sijainti voitiin paikallistaa slave-mikrokontrollerista.
3. Hallittiin kauko-ohjauksen radiotaajuutta mikrokontrollerilla (ESP32)
Tässä vaiheessa kontrolloitiin kauko-ohjauksen radiotaajuutta ESP32 UWB -mikrokontrollerilla ja sen jälkeen hallinnoitiin spottivaloa. Sama yhteys täytyi perustaa jokaiselle painikkeelle kauko-ohjauslaitteessa, jotta voi ohjata valoa mikrokontrollerilla kauko-ohjauksen avulla.
4. Käännettiin etäisyysmitta sijaintikoordinaateiksi ja komennoiksi, jotka valo voi ymmärtää
Nyt aikaan oli siis saatu ohjelma, joka moduulin perusteella kertoo etäisyyden. On myös spottivalo, jota voi liikuttaa. Haasteena oli vielä saada ne toimimaan yhdessä, eli että valo saadaan liikkumaan oikeaan suuntaan.
Projektin on määrä valmistua toukokuun 2023 lopussa. Sen lopputuloksena on Aurigalle toimiva prototyyppi spottivalosta, joka seuraa automaattisesti rekan ulkopuolella liikkuvaa kuskia ja valaisee hänen ympäristön.