
28 Rakennuspalvelu - rakennustelineen napamoottorin ohjaaminen PS4-ohjaimella
Tiivistelmä
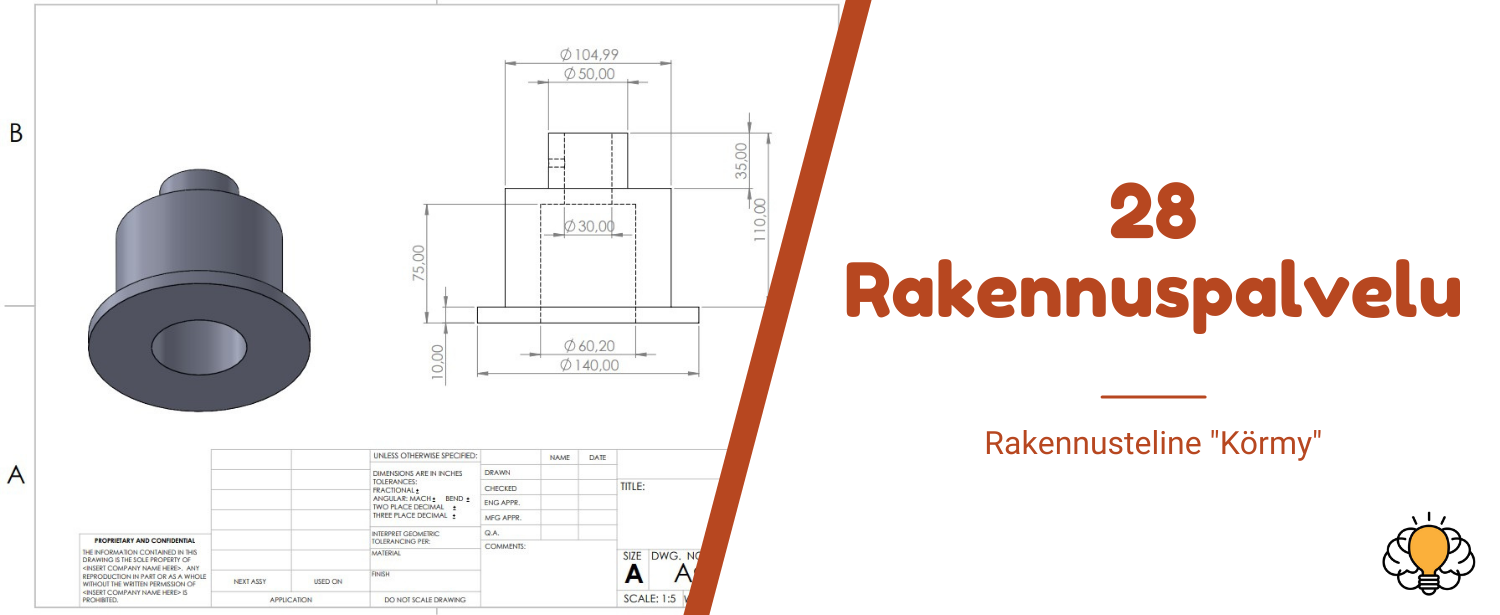
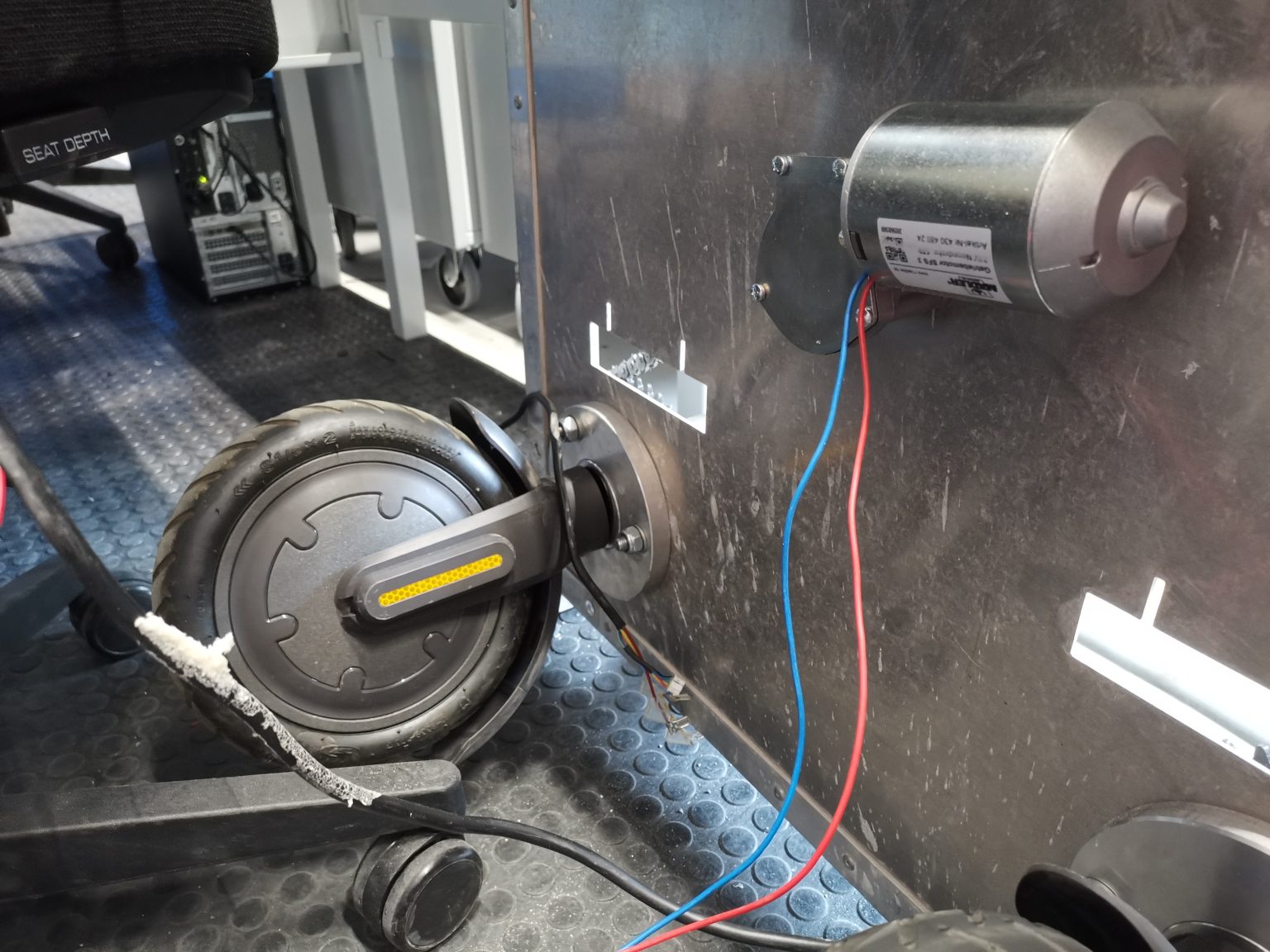
Projektin tavoitteena oli suunnitella ja asentaa sähköinen ohjaus ja napamoottorit Körmyksi nimikoituun rakennustelineeseen. Asiakkaan toiveena oli, että ohjaus toteutettaisiin kauko-ohjauksella. Rakennustelinettä käytettäisiin työmailla maalaustöissä, joten valmiin tuotteen tulisi olla liikkumiskykyinen työmaaolosuhteissa.
– Idea projektiin tuli yrittäjältä.
– Projektissa kehitettiin uusia ratkaisuja rakennustelineen siirtoon työmaalla
– Suvituuli toteutettiin keväällä 2022 ja työtä jatkettiin kesällä 2022 Salama-projektina.
