
31 Robottisimulointi Gazebo-ympäristössä
Kuvaus
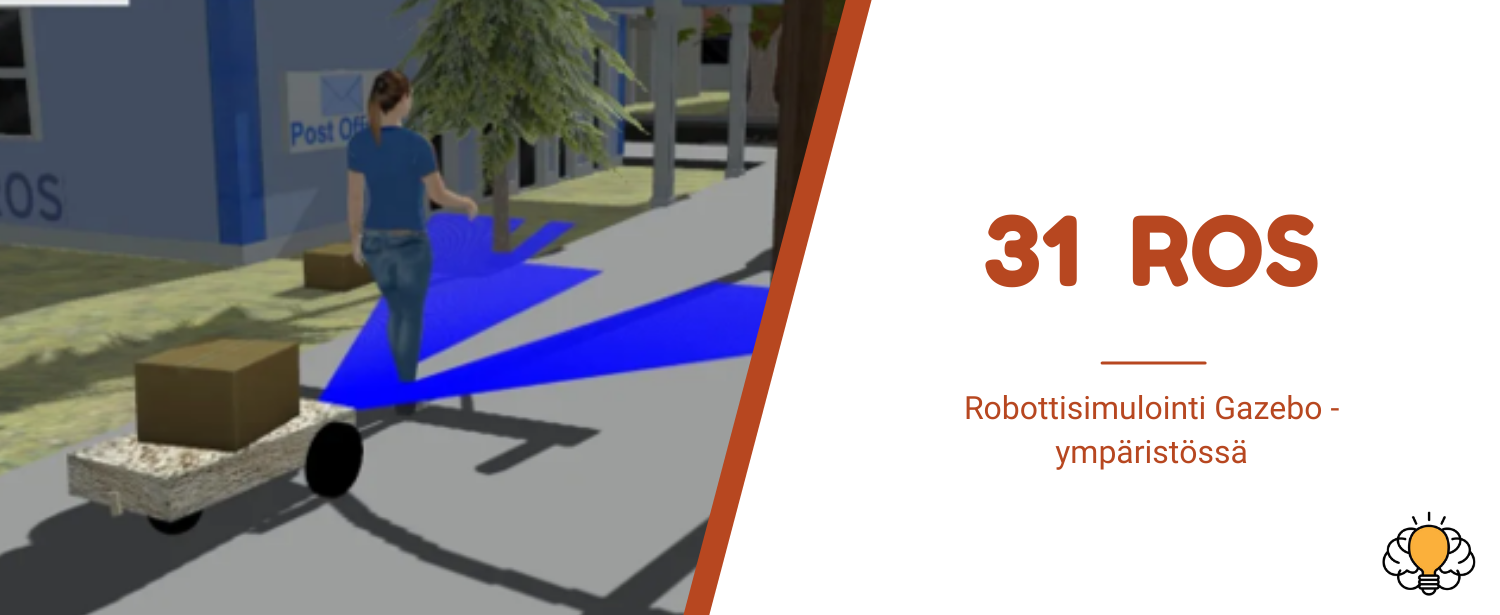
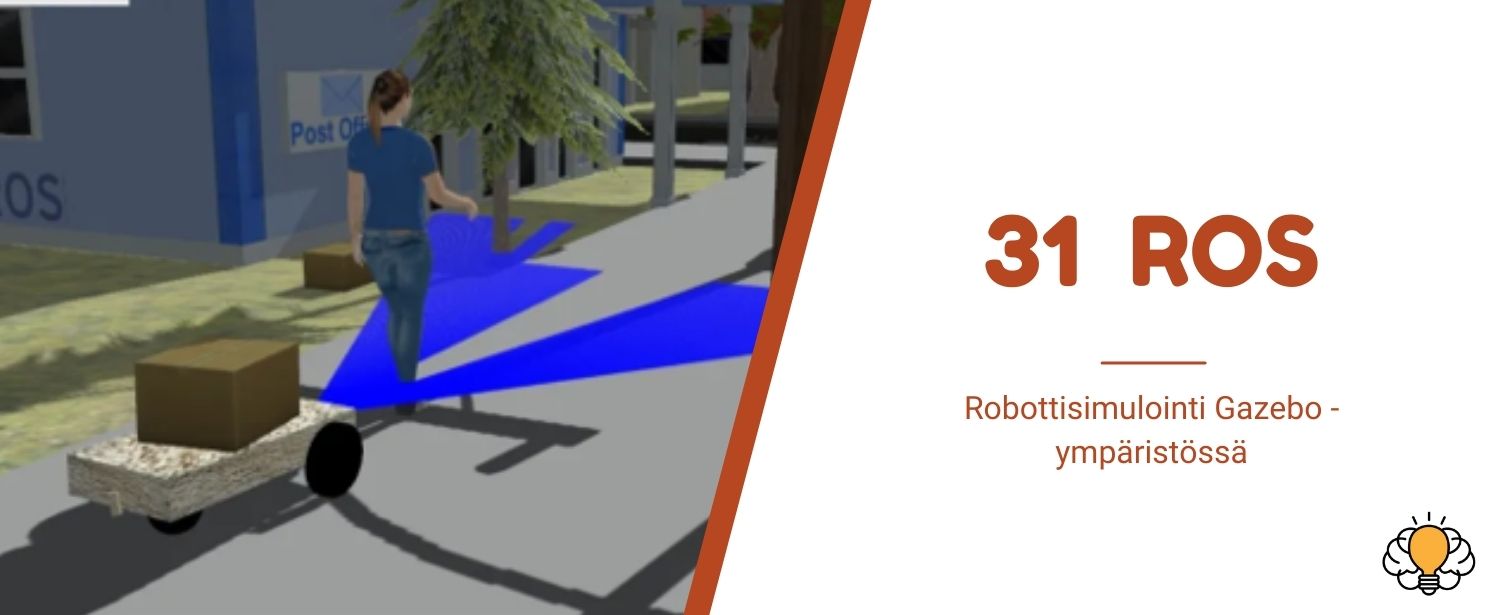
Projektin tavoitteena oli tutkia ROS-pohjaista (Robot operating system) robottiohjelmointia ja -simulointia Gazebo-ympäristössä. Robotteina käytettiin Turtle Bot -pienoisrobotteja. Simulaatio toteutettiin ensin yhdellä robotilla, jonka jälkeen tutkittiin, miten koe voidaan toistaa oikealla robotilla. Tulokset dokumentoitiin ja niihin perustuen luotiin ohjeistus Metropolian opiskelijoille kokeen toistamiseksi ja hyödyntämiseksi opinnoissa.
Gazebo on ohjelmisto, joka mahdolistaa simuloinnin tarkasti ja tehokkaasti monimutkaisissa sisä- ja ulkotiloissa.
– Projekti toteutettiin keväällä 2022.
