

Yhteinen matka kobottien kanssa
Robo Garagen mallintaminen
Osallistuin Metropolian kanssa Big-Flash nimiseen hankkeeseen, jonka tarkoituksena ja tavoitteena on edistää yritysten uudistumista ja uusien teknologioiden kokeilemista ja hyödyntämistä. Tässä hankkeessa toteutin kaksi simulaatiota, toisen ABB:n Robotstudiolla ja toisen Visual Componentsin Visual Components Premiumilla. Sain tämän projektin myötä monipuolista kokemusta simuloinnista ja kobotiikasta.
Kobotti tulee englanninkielisistä sanoista collaborative robot, eli yhteistyörobotti. Monesti suomalaisilla sivustoilla saatetaan kirjoittaa kobotti myös c:llä, eli cobotti, mikä johtunee siitä, että kyseessä on vielä melko tuore tekniikan ala, eikä siitä ole vielä sovittu tarkemmin, että miten se kirjoitetaan näin suomalaisittain. Kuitenkin kobotiikka tai cobotiikka tarkoittaa yhteistyörobotiikka, joka tulee siitä, että nämä robotit tekevät yhteistyötä ihmisen kanssa samoissa tiloissa, jopa samalla tuotantolinjalla vieretysten. Tämän mahdollistaa kobottien pieni koko ja turvallisuusominaisuudet.

Metropolian Robo Garage työpaja.
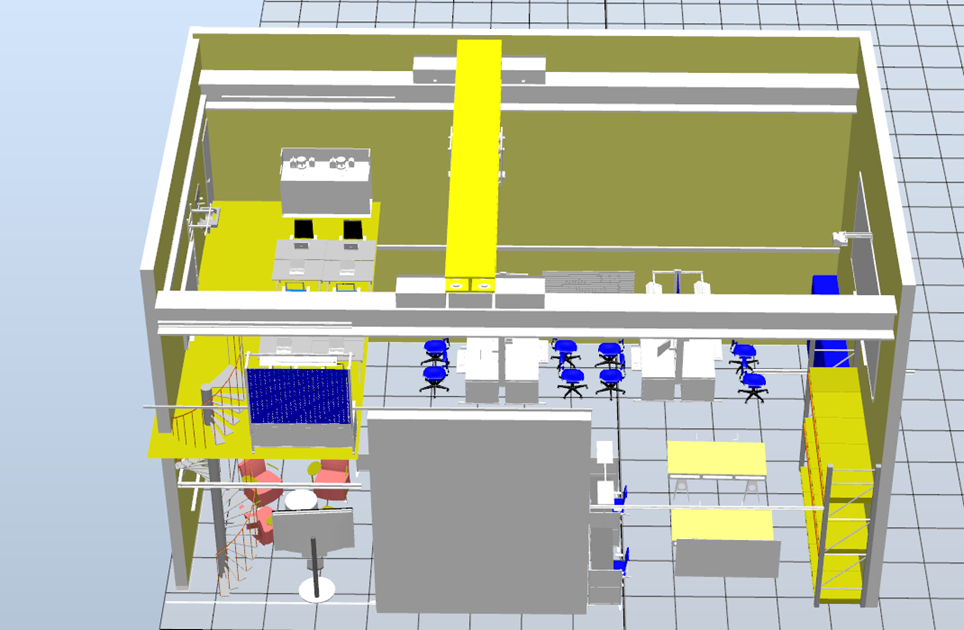
Tällainen ympäristö syntyi Robotstudion simulaatioon.
Projektin tarkoituksena oli herättää mahdollisten teknologioiden tarjoajien mielenkiinto lähteä mukaan hankkeeseen sen myöhemmissä vaiheissa. Tämä voisi onnistua simulaatioita esittelemällä teknologiamessuilla, joihin osallistuisi varmasti paljon kobottialan yrityksiä. Teknologian tarjoaja voisi tarjota kobotteja ja lisävarusteita koululle opiskelijoiden käyttöön ja vastapainoksi teknologian tarjoaja voisi saada uusia näkökulmia kobottien hyödyntämiseen opiskelijoilta ja ohjaajilta. Harmi vain, että teknologiamessut siirtyivät marraskuulta ensi vuoden toukokuulle (2022).
Metropolialla on Myyrmäessä Robo Garage niminen työpaja, joka on tarkoitettu Big-Flash tyyppisiä hankkeita varten. Siksi simulaatioiden teko alkoi tätä ympäristöä jäljittelemällä niiden pohjaksi. Valokuvasin työpajan ja sain myös erään opettajan aikaisemmin tekemän 3d autocad pohjan samasta tilasta. Tätä pohjaa yritin hyödyntää molemmissa simulaatioissa. Aluksi pohjaksi saatu tiedosto ei suostunut aukeamaan kummassakaan ohjelmistossa (Robotstudio ja Visual Components), mutta lukuisten uudelleen tallennusten ja muiden yritysten jälkeen onnistuin saamaan sen auki Robotstudiossa jopa oikeassa mittakaavassa. Tuloksena sain lopulta ihan hyvän ympäristön simulaatioon. Visual Componentsin ympäristön loin kirjastosta löytyvien osien ja mallien avulla.
Tämä 3d ympäristön luominen oli minulle täysin uusi asia tässä projektissa ja uskon, että se valtaa robotti- ja automaatiosuunnittelun alaa yhä enemmän tulevaisuudessa. Siksi koin tämän asian olleen itsellenikin hyödyllistä ja kaikki uuden oppiminen, jota voi hyödyntää tulevaisuudessa on itseäni aina innostanut. Lisäksi haasteet kaikenlaisissa projekteissa lisäävät omakohtaisesti motivaatiota ja mielenkiintoa niihin, koska liika helppous taas tekee niistä tylsiä.
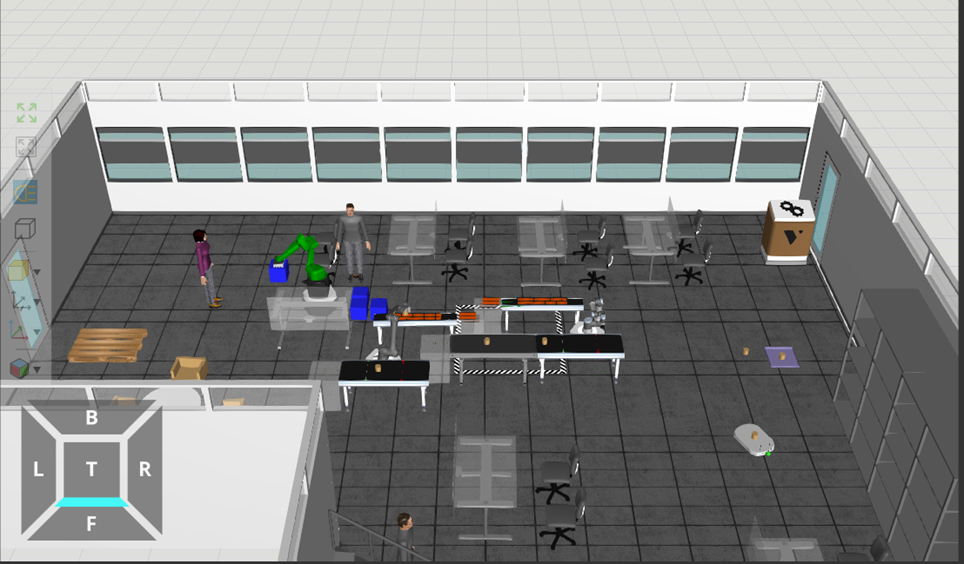
Ja tällainen Visual Componentsin.
Simulaatiot
Seuraavana oli vuorossa kobottien lisääminen simulaatioihin ja niiden ohjelmointi. Lisäksi piti lisätä myös vähän rekvisiittaa, kuten kuljettimia, liikuteltavia tuotteita, ihmisiä yms. Toiveena oli, että liikettä simulointi videoihin pitäisi saada mahdollisimman paljon. Tämä toive oli helpompaa toteuttaa Visual Componentsin simulaatiossa, koska heidän ohjelmistossaan on noin 60 eri laitevalmistajien kobotteja, kun taas Robotstudiossa on vain ABB:n omia, joita ei kovin montaa ollut.
Koboteiksi Visual Components simulaatioon tulivat Omronin LD60 mobiilirobotti, Fanucin CR-15iA, Techmanin TM12 ja Universal Robotsin UR16e. Robotstudion simulaatioon taas tuli Yumi dual arm ja Yumi single arm kobotit, eli kaksikätinen ja yksikätinen.
Kokeilin oikean kobotin simulaatiota/liikuttelua koululla projektin alussa. Nyt kun jälkikäteen vertailen, niin kobotin ohjelmointi oli helpompaa livenä kuin simulaatioissa, ainakin tämä ohjelmoimani UR3 oli todella helppoa saada tottelemaan käskyjäni, mutta sama ei onnistunut yhtä helposti näiden ohjelmistojen avulla.
Kokeilin oikean kobotin simulaatiota/liikuttelua koululla projektin alussa. Nyt kun jälkikäteen vertailen, niin kobotin ohjelmointi oli helpompaa livenä kuin simulaatioissa, ainakin tämä ohjelmoimani UR3 oli todella helppoa saada tottelemaan käskyjäni, mutta sama ei onnistunut yhtä helposti näiden ohjelmistojen avulla.
Monesti kun uusi päivä alkoi ja kokeilin miten eilen tallennettu ja hyvin toiminut simulaatio tänään toimii, se ei yleensä toiminut. Tästä syystä aamu alkoikin usein ongelmien selvittämisellä. Syitä olivat esimerkiksi, että jokin koodin pätkä oli monistanut itsensä tai sitten toinen koodinpätkä oli hukkunut salaperäisesti. Näin siltikin, vaikka en ollut koskenutkaan itse koodiin ollenkaan, vaan olin ohjelmoinut ns. kädestä pitäen menetelmällä, eli opettamalla kobotille liikkeet piste pisteeltä. Hyvä puoli oli, että tässä tavassa ohjelmoida ei tarvitse koskea ohjelmakoodiin ollenkaan ja siksi näin kokemattomankin kaverin oli helppo saada simulointi onnistumaan suunnitellusti pienen opettelun jälkeen.
Sain lopulta simulaatiot suurin piirtein sellaisiksi kuin oli ollut tarkoituskin. Laitan tähän loppuun vielä kuvat molemmista simulaatiosta, kun ne ovat käynnissä. Jos joku kuitenkin ehdottaisi minulle vielä, että lähtisitkö mukaan projektiin, jossa pitäisi simuloida koboteilla, miettisin kaksi kertaa ennen kuin vastaisin.
Kiitos matkasta kobottikaverit.
Kirjoittaja
Jukka Nikula
Salama-assistentti